

En uppmärksam person la märke till en väldigt speciell Tesla Model S i Kalifornien. Monterad på dess backspeglar var något som onekligen ser ut att vara Lidar-sensorer.
Det anmärkningsvärda i fyndet är att i mångas ögon är Lidar-sensorer nyckeln till helt autonoma självkörande bilar. Problemet med de sensorer dagens Tesla Model S har -en radar och en kamera- är att de tittar bara rakt framåt. Det är därför bilen klarar av att köra själv på motorvägar, men kan inte titta åt sidan i en korsning.
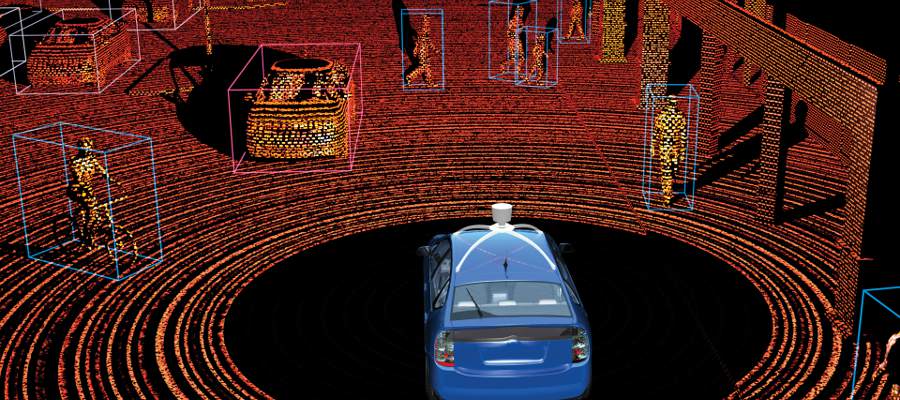
Lidar används av bland annat Googles självkörande bilar till att skapa 3D bilder av bilens omgivningar så datorn kan styra bilen inte enbart på motorväg utan även i krävande stadstrafik. Genom att svepa en laserstråle runt bilen och mäta avståndet till alla ytor som träffas av den kan en ytterst exakt 3D modell av bilens omgivningar byggas upp.
Fördelen med Lidar är att den genererar en 3D modell som är lättförstådd för datorer. Den roterande sensorn ger dessutom en 360 graders heltäckande vy runt hela bilen. Nackdelen är att sensorn är väldigt dyr – den sensorn Googles bilar använder kostar 70,000 dollar.

Nissan håller också på och experimenterar med självkörande bilar; de har tagit fram en mycket billigare variant av Lidar, utan rörliga delar. Den sensorn som sitter på den “ertappade” Model S är nog också billigare än Googles, iom att de satte två på bilen, vid var sin backspegel istället för en enda på taket.

Elon Musk har tidigare uttalat sig om att han tycker Lidar är en för dyr och krånglig väg att gå. Han förespråkade istället den alternativa tekniken som bland annat Nvidia håller på att utveckla som enbart förlitar sig på kameror. Genom att analysera bilderna av massor med små kameror runt om bilden kan datorn läras se omgivningarna som det mänskliga ögat – vi människor klarar ju av att köra bilar enbart med hjälp av våra två ögon, utan svepande laserstrålar. Den teknologin använder sig av billigare sensorer men behöver mycket större processorkraft på grund av en otroligt komplex analys av bilderna.

Bilen hade även mycket mer avancerad radar i fronten än standard-Model S och flera kameror monterade innanför vindrutan.
Betyder detta att Tesla Motors har övergivit kamera-spåret och ändå kommer förlita sig på Lidar-sensorer i sina kommande autonoma självkörande bilar? Kanske.
Vi vet inte om bilen över huvud taget tillhör Tesla Motors. Den kan lika gärna vara en rullande testbädd av autonoma bilar för någon annan tillverkare. Vi vet sedan förut att till exempel Bosch experimenterar också med självkörande bilar – och har använt Tesla Model S som testbil.
Den snyggt formgivna backspegelkåpan med integrerad Lidar-sensor pekar dock på att projektet är långt framgånget och professionellt drivet, inget garageprojekt.
Professionellt formgiven och producerad ja men inte snyggt formgiven enligt mitt tycke.
Allting är ju relativt, ja. Jämfört med Googles lösning så är det onekligen snyggare:
http://cdn.slashgear.com/wp-content/uploads/2014/06/google-lidar-600×282.jpeg
Nu är ju den där “lösningen” en tidig prototyp som idag är lite mer raffinerad. Sen kan man ju fråga sig hur snygg den nyare saftblandaren är också… Vi kanske vänjer oss precis som att backspeglar idag sticker ut från bilkroppen på ett halv-märkligt sett. http://a.fastcompany.net/multisite_files/fastcompany/imagecache/inline-large/inline/2014/12/3040322-inline-i-1-google-car-tk.jpg
Googles lidar lösning är inte heller produktions färdig. Mycket av de 70 dollar den kostar kan optimeras bort i samband med ev masstillverkning. DN är ganska handknackad idag.
Dessutom ganska lätt att göra snygga grejer fort och enkelt med addetativtillverkning (3D-skrivare).
Tror inte riktigt att Tesla planerar att sätta en så där stor klump på backspegeln samtidigt som de vill ta bort speglarna helt pga luftmotståndet.
Håller med, men kanske är det så att själva cylindern som innehåller LIDAR:n fälls ned när i backspegeln när den inte används, då blir designen betydligt mindre klumpig i mitt tycke.
Det hela är mycket enkelt. Elon kommer att använda stereokameratekniken, men den är inte färdig ännu. Under tiden får de använda sig av Lidar för att skapa en 3d-rymd för att ha till utvecklingen av själva autonomitekniken. När stereokameratekniken är färdig swappar de in den i stället för Lidar.
Har du någon källa på det eller bygger du de tankarna på Teslas och Nvidias idag redan ganska nära samarbete? Stereokameratekniken är redan “färdig” i alla fal tillräckligt färdig för att användas i DJI senaste drönare https://youtu.be/hX0UELNRR1I?t=54s och säkerligen färdig nog för att bygga 3d-rymder med hårdvara i en bil som inte har samma begränsningar kring tyngd och energiåtgång.