
Tesla Motors har släppt detaljer om sin kommande version 8 av mjukvaran till sina bilar.
Mest spektakulära nyheten i version 8 skulle förblivit bokstavligen osynlig om inte Elon Musk berättade om den på ett pressmöte och blogginlägg. Nya mjukvaran kommer använda bilarnas radar mycket mer än tidigare versioner. Den ska se omvärlden framför bilen i 3D, i ett punktmoln liknande autonoma bilars lidar-sensorer ger.
Visst skulle det vara intressant att kunna se vad radarn kan se? Tyvärr har Tesla Motors ej släppt några bilder. Och söker man på radar imaging på Google får man mest militära träffar, med bilder på satelliter, flygplan och tanks… Teknologin är verkligen cutting-edge.
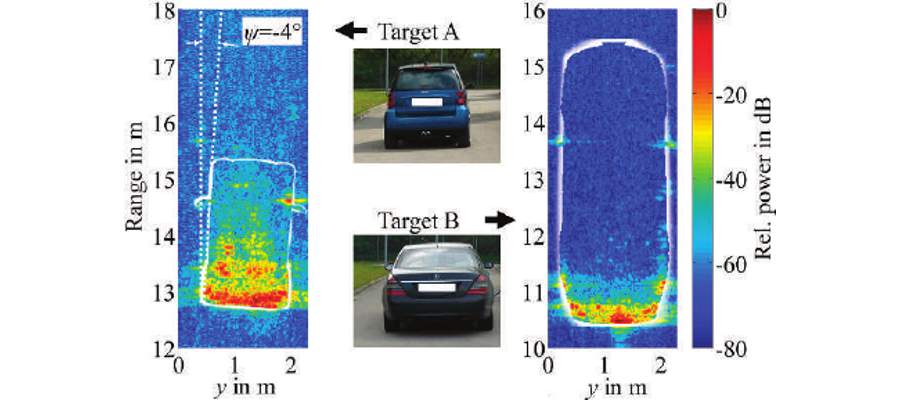
Men så snubblade jag över en forskningsrapport där teknologin används just till detektering av bilar. Bilden högst uppe är från den rapporten.
Det som är det mest intressanta är att radar -till skillnad från lidar som tex Googles självkörande bilar använder- kan ge flera träffar i djupled på samma stråle. Medan tex en laserstråle som träffar en bils bakre kofångare endast kan se bara bilens baksida kan en radarstråle både studsa från bakre kofångaren men en del av strålen fortsätta och studsa tillbaka från motorblocket i bilen, främfre kofångaren – eller till och med bilen framför bilen framför oss! Radarn kan likt en röntgenstråle se genom saker.
Genom dimma, regn, djur, människor och andra mjuka föremål passerar strålen utan större problem. Från metall studsar den tillbaka, men tränger även delvis igenom tunna plåtar. Strålar som studsar mot marken eller omgivande föremål kan även se runt hindrande objekt. Elon Musk nämnde just sådana studsande strålar som möjliggör att Teslan ska kunna se inte bara bilen framför den utan även två bilar framåt. Radarn kommer detektera bilar du inte ens kan se!
Det är svårt att visualisera 3D-bilden radarn ger. Bilden ovan visar endast 2D uppifrån. Teslas radar har nog lägre upplösning än forskarteamets. Men även dessa bilder visar hur radarn ser igenom bilarna.
Man ser dock även att bilden radarn ser är inte likt det våra ögon ser. Människor, trä, plast är i stort sett genomskinliga men metall är som speglar. Böjda metallytor som tex en ölburk kan ge upphov till “optiska synvillor” för radarn som tror de är större än vad de egentligen är. Det är mycket nytt autopiloten måste lära sig innan den kan se bra med sitt nya öga. Det är här Teslas autopilots två fördelar kommer in: observing och fleet-learning.
Observing innebär att autopiloten är igång även när den inte är påslagen och styr bilen. Istället observerar den hur mänskliga föraren beter sig, den jämför hur autopiloten skulle ha styrt bilen vid varje givet tillfälle med vad människan gjorde. Du lär autopiloten medan du kör bilen.
Fleet-learning innebär att bilarna delar med sig av sina erfarenheter till varandra. Om det tex finns en skylt nära vägbanan som bilarna blir “rädda” för och bromsar i onödan, varje gång mänskliga föraren tar över och gasar igen lär sig bilarna att det hindret där är ofarligt. Första bilen bromsar, nästa bromsar mindre, nästa bara saktar in, sedan har alla Teslor lärt sig att skylten är ofarlig. Eller med vilken fart en kurva kan tas.
Version 8 släpps om nån vecka, sedan kommer det ta någon vecka eller månad tills bilarna har lärt sig använda sina nya ögon ordentligt. Resultatet kommer bli en ännu pålitligare autopilot – en som kommer börja klara vissa trafiksituationer bättre än människor, på grund av sin förmåga att se genom saker!
Så spørs det om radaren blir en helserisiko…?
Jo Elon Musk nämnde att de lanserar skyddsmössor av stanniol för att minska potentiella risker för de mest bekymrade.
jätteintressant, men har dock tveksamheter till fleetlearning, för vad händer om den lär sig fel!
ex vid renovering av broar där vägen får en annan avfart. När vår lokala vattenbro renoverades gjordes en väg runt kvarteret över en konstgjord bro som sedan togs bort (var så under ett halvår, så alla bilar körde så att säga i vattnet enligt kartan, gps navigatorn var först helt vanvettig men tystnade efter ett tag) eller tillfälliga vägombyggnader där man kör över på mötande körfält.
Nu tror jag inte att det kommer bli så allvarligt för det mesta handlar om att inte bromsa i onödan, men skulle hellre se en till kamera som verifikation i bilen i beslutsögonblicket framför information som man inte vet hur gammal den är. Nu är det inte burkar man oroar sig för att den skall bromsa för utan den detekterar barn/cyklister eller kanske smådjur rätt. (har kört över en grävling och det är inte roligt)
fleetlearnig (bilar som håller kontakt med varandra) anser jag är framtiden måste jag påpeka, men man får ändå ha reservationer.