
Ofta när man diskuterar självkörande bilar kommer diskussionen in på LIDAR. LIDAR är ungefär som RADAR, fast istället för radiosignaler sveper LIDAR runt en laserstråle som skannar av omgivningen. Laserstrålen studsar tillbaka från föremål och genom att mäta tiden det tog för ljuset att komma tillbaka kan man avgöra avståndet till träffytan. Ända sedan de första försöken med självkörande bilar har de blivit nästan synonyma med LIDAR.
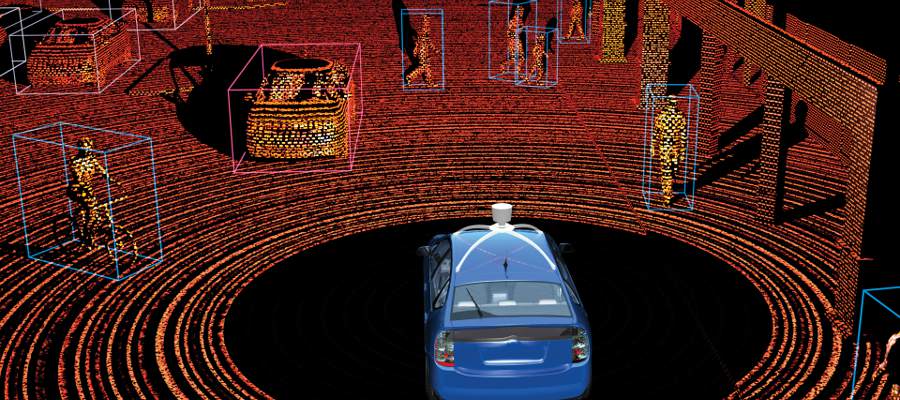
Därför är det så kontroversiellt att Tesla valde att som enda bolag utveckla självkörande bilar utan LIDAR. Hur ska bilen fatta sin omgivning utan att ha den detaljerade 3D punktmolnet en LIDAR på taket kan ge? Ovan bild visar hur en självkörande bil med LIDAR “ser” sin omgivning.
LIDAR har en enorm fördel och en enorm nackdel. Fördelen är att den kan leverera 3D information om bilens omgivningar på ett sätt som är lättförståelig för datorer. De kan på relativt enkelt sätt förstå datat LIDAR genererar och bygga en förståelse av föremålen runt om bilen. Nackdelen är att LIDAR sensoren är dyr. Nuförtiden är den inte löjligt dyr som när de första försöken började, då kostade en LIDAR sensor hundratusentals kronor – nuförtiden kostar den “bara” tiotusentals kronor. Fortfarande skulle den dock utgöra en rejäl del av bilens pris.
Tesla satsade istället på att sätta ett antal ganska enkla kameror runt om på bilen. Åtta stycken kameror knappt större eller bättre än dem som sitter på din mobiltelefon betraktar omvärlden. Kamerorna kostar inte många kronor, faktum är att de är så billiga att företaget har valt att utrusta alla sina bilar med dem – även dem det inte köpts till någon självkörningsförmåga. Kamerornas enorma fördel är alltså priset. Deras enorma nackdel är däremot att det är tusentals gånger svårare att få en dator förstå sin omgivning genom att betrakta kamerabilder än att skanna av den med laserstråle. Det 3D info man får “gratis” färdigt från LIDAR tar massor med processorkraft att få fram från vanliga kameror.
När Tesla började sin satsning på självkörande bilar för sisådär fem år sedan insåg de snabbt att priset på processorkraft sjunker mycket snabbare än priset på LIDAR sensorer. De satsade på att tids nog kommer det bli billigare att ha en dator som klarar av att “fatta” billiga kamerabilder än att betala för en dyr LIDAR som levererar mer lättfattlig data. Med Teslas nya självutvecklade datachip verkar de ha fått rätt: den har tillräcklig datakraft att kunna “se” med bilens åtta kameror lika bra som en människa, mer om det nedan.
När du själv kör bil skickar dina ögon inte ut några laserstrålar. Du använder dig av två kameror, dina ögon, och en väldigt avancerad dator, din hjärna, för att fatta vad du ser. Det är allt som behövs för att i ur och skur kunna se din omgivning och fatta hur du ska kunna köra din bil. Du ser vägen, du ser de andra bilarna, du ser skyltarna, osv.
Det Tesla har uppnått med sin självkörande bil är att dess kameror ser på samma sätt som dina ögon sin omgivning (fast till skillnad från dig alla 360 grader runt om samtidigt, hela tiden) och dess dator simulerar faktiskt din hjärnas hjärnceller och uppfattar sin omgivning på samma sätt som du.
Jag får ofta konstiga frågor från folk om hur självkörande bilar ska kunna klara köra på vintern när vägmarkeringarna inte syns. Eller hur de ska kunna fatta andra bilars blinkers signaler, eller klara av hinder på vägen? Mitt svar är alltid “på samma sätt som du”. Dina ögon-kameror och hjärna-dator klarar av att fatta hur du ska köra – då kan även bilens kameror och dator göra likadant.
Det är svårt att hänga med i den snabba utvecklingen. Bara för något år sedan kunde datorerna bara hantera bilder från en enda kamera. Inte ens i full upplösning utan bilden fick skalas ner för att datorn skulle hinna med att bearbeta all indata. Med ökad datakraft kunde högre och högre upplösta bilder från fler och fler kameror bearbetas. Teslas nya processor kan nu utan problem göra mycket avancerade bearbetningar av åtta samtidiga kameror i full upplösning.
Här får LIDAR ännu ett problem: medan det är lätt och billigt att montera högupplösta kameror kan man inte öka upplösningen på LIDAR utan att kostnaderna skenar iväg. Från en redan alldeles för dyr utgångspunkt.
Lösningen vissa aktörer valt är då att i förväg skanna av omgivningarna i hög upplösning och sedan låta bilarna köra med enklare LIDAR skanners som egentligen bara känner igen sig, “aha här är jag”. Den självklara nackdelen med sådana lösningar är att vägen bilen ska åka måste ha skannats av i förväg annars kan inte bilen åka där – och vad händer om något hade ändrats sedan dess?
Därför har Tesla övergett idén med högupplösta kartor. Bilen ska kunna klara sig åka även på okända gator precis som du klarar dig i städer du aldrig kört i förut. Allt du -och i framtiden bilen- behöver är en vanlig Google-karta för att hitta bland gatorna.
Tesla har i nedan video demonstrerat hur deras dator klarar att från de åtta kamerornas bilder skapa samma 3D modell som LIDAR brukar ge ifrån sig. Fast i högre upplösning och till en bråkdel av priset. Nedan sekvens är slutgiltiga beviset för att Tesla inte behöver ha LIDAR – för den kan ju få fram samma data från sina små billiga kameror:
This 3D reconstruction shows the immense amount of depth information a Tesla can collect from just a few seconds of video from the vehicle’s 8 cameras pic.twitter.com/w2x6pkM2Eb
— Tesla (@Tesla) April 23, 2019
Slutligen har LIDAR stora problem med regn och snö, små partiklar i luften som stör laserljuset. Kameror klarar av att se genom dem på samma sätt mänskliga ögat gör. LIDAR har dock en fördel, den ser lika bra natt som dag – fast lösningen för det som ska hjälpa både ögon och kameror att se på natten heter billyktor.
En sak Teslas kameror dock har problem med är snöslask. Inte så mycket när det yr runt i luften utan när den lägger sig på kamerorna och geggar igen dem. Det märks redan idag med autopiloten, och behöver ny hårdvara (pyttesmå vindrutetorkare?) för att ha en chans att fungera. LIDAR har iofs samma problem, men när folk frågar “kommer självkörande bilar verkligen kunna fungera på vintern?” så är tyvärr svaret än så länge “nej”, men inte på grund av problem med att hitta vägen under snön (kan dina ögon hitta den kan datorn också) utan på grund av den alligengeggande snöblasket. Folk i självkörande bilar får vara beredda på att bilen kommer stanna och be dem skrapa kamerorna rena igen.
Hoppas det kommer bilar med kameror med infraljussensor. Dessa är billiga men fördelen är att de fungerar i motljus och i mörker till skillnad från vanliga kameror.
Jag tror iofs inte att någon kommer att förlita sig på data från enbart en LIDAR för total självkörning utan snarare LIDAR i kombination med kameror och kanske även radar. Kanske overkill? Det får vi se men det är inte fel att kontinuerligt jämföra data från olika typer av sensorer innan bilen tar beslut för en drastisk manöver så som en panikbromsning eller en undanmanöver. Priserna för en LIDAR lär även de sjunka drastiskt framöver precis som all elektronik tenderar att göra i takt med att populariteten ökar och fler aktörer konkurrerar om marknaden.
Sen är ju inte så att det är raketforskning att installera utrustning i bilen som gör rent kamerorna automatiskt, men Tesla har uppenbarligen valt att inte göra det. Har för mig att Nissan redan idag har spolning av backkameran i några av sina modeller. Bara man får bildbehandlingen i datorn att känna igen smuts på linsen är det ju sen en smal sak att spola lite vatten, ett litet motstånd som kan värma linsen vid kyla och/eller fukt hade också varit bra.
De viktigaste 3 kamerorna i en Tesla sitter bakom framrutan och vindrutetorkarna håller dem rena. Andra kameror kanske bilen ber sin passagerare att torka av om det behövs.
Skulle nog vilja påstå att alla kameror är viktiga för en säker färd. Jag föredrar fortfarande att bilen rengör kamerorna själv, speciellt om jag åker i den som taxipassagerare. Inte raketforskning som sagt, och med tanke på att ett av Musks bolag håller på med just raketforskning bör ju kompetensen finnas. 😛
Jag har för mig att det finns utrustning för uppvärmning av kamerorna, åtminstånde på B-stolparna i Teslorna. Eller har jag drömt detta?
Jo du har nog rätt, uppvärmning verkar finnas! 🙂
Teslas kameror ser väl bättre i mörker och har högre uppdateringsfrekvens än vad vi har?
Radarn hjälper också till med inlärning av att se 3d då den ger exakta avstånd till allt bilen ser framåt. Radarn kan även hjälpa till med att se genom regn, snö, bländande ljus och mörker.
kameror kan också jobba med andra spektrum som ex infrarött. människor och djur lyser som fyrbåkar i sammanhanget. Också i djupaste mörker och genom snö slask och regn.
Apropå smutsiga kameror, där kan man väl kopiera samma lösning som vi människor har, dvs ögonlock som rensar linsen efter behov. Borde inte vara jättedyrt att kopiera någon sådan lösning…
Du menar “torkare”? 😉
Oavsett system så verkar det fruktansvärt om inte autopilot funkar i vissa lägen! Jag har ett par kurvor och omålade sträckor som bilen totalvägrar AP. Det är inte jobbigt att ta över och köra manuellt en stund.