Så har det hänt igen, ett självkörande fordon, en buss den här gången, inblandad i en olycka. Den förarlösa bussen ska trafikera “The Strip” i Las Vegas – men redan första premiärdagen blev den krockad.
Så vad hände? Körde den av vägen? Körde in i någon annan bil? Missade ett rödljus? Nej, nej, allt sånt klarade den av galant. Största problemet för dagens självkörande fordon är inte längre att klara sig i trafiken. Största problemet är att undvika att människor kör in i dem.
Det som hände med bussen var att en leveranslastbil framför den höll på att backa. Bussen märkte av den och stannade. Lastbilen fortsatte dock backa, långsamt, långsamt, ända till den körde in i den stillastående bussen. Krock är att ta i, det blev bara en lätt sammanstötning, ingen skadade sig.
Lastbilens chaufför må hävda att han inte såg bussen, men ska vi gissa så var han säkert mycket väl medveten om att bussen stod där. Anledningen till att han ändå fortsatte backa i långsam fart var säkert just för att få bussen att flytta på sig. Eller så förväntade han sig att bli tutad på om han kom för nära. Stackars autonoma bussen hade inte en chans – den var inte programmerad att göra någotdera.
En knapp månad sedan berättade vi om flera liknande olyckor i Kalifornien. Självkörande bilar som klarar trafiken galant, men som blir påkörda av mänskliga bilister. Att de självkörande bilarna stannar för varje stoppskylt och lämnar alltid företräda där de ska är något som överraskar de mänskliga förarna bakom dem och kör in i bilarna bakifrån. Eller så kör de om bilarna men kastar in sig så snävt framför den självkörande bilen att de sliter av de sensorer som sticker ut från bilarnas främre kofångare. En gång var det en full cyklist som cyklade rätt in i en stillastående självkörande bil.
För att de självkörande bilarna ska klara sig i trafiken måste de lära sig hantera ett viktigt redskap: tutan.
De måste lära sig tuffa till sig och kunna hävda sig. Här är jag! Akta dig! Skulle den självkörande bussen tutat när den märkte att lastbilen höll på att backa in i honom skulle olyckan kunnat undvikas. Likaså om bilen skulle ha tutat på fulla cyklisten.
Om tutandet inte hjälper måste dessutom bilarna lära sig undvika idioterna. När artificiell intelligens möter mänsklig dumhet. Står bilen still och ser någon backa rätt mot den så ska den tuta. Men om det inte hjälper måste den även själv lägga i backen och undvika krock. Att som idag stanna, stå still och hoppas på att människan i den andra bilen har mätbar IQ hjälper tyvärr inte alltid.
Kaliforniska trafikverket DMV kräver att alla olyckor med självkörande bilar ska rapporteras. Läser vi rapporterna framträder en dyster bild där de självkörande bilarnas största problem är inte längre att undvika köra in i saker – utan människor som inte klarar av att undvika köra in i dem.
Vill du se hur pass bra en modern självkörande bil klarar av att ta sig fram i trafiken ska du titta på filmen i vår tidigare artikel om självkörande Bolt.
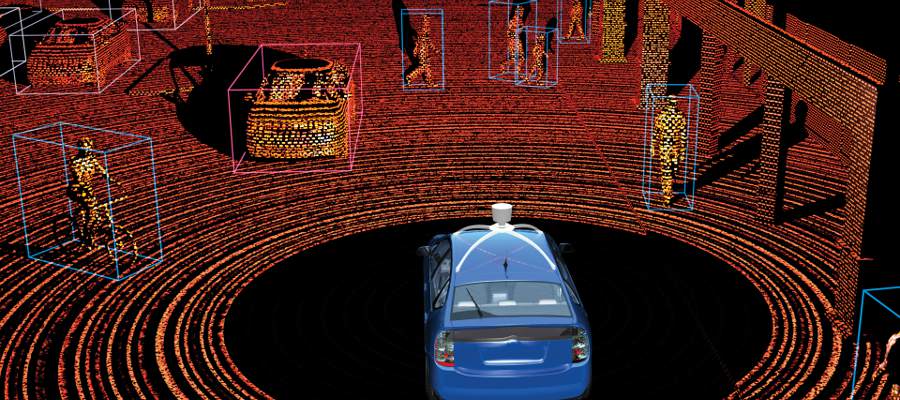
Och vill du se hur en självkörande bil ser sin omgivning ska du titta på filmen i vår tidigare artikel om Googles självkörande bil.