

Undrar du ifall Teslas självkörande mjukvara ligger före eller efter konkurrenternas ska du ta en titt på ovan bild.
Tesla har släppt deras självkörande mjukvara till några tusen noga utvalda testförare i USA. De kör runt med en tidig beta-version av mjukvaran i bilarna under noga uppsikt.
Även andra företag, som till exempel Googles Waymo och General Motors Cruise har självkörande testbilar i några amerikanska städer.
Några ukrainska hackare lyckades dock läsa ut mjukvaran från en utav Teslas självkörande bilar och ladda in den i deras egen bil. Plötsligt fanns det en självkörande Tesla i Kiev också!
Och därmed demonstrerade de Teslas enorma försprång mot Waymo, Cruise och de andra!
För Teslan började glatt köra runt även på gatorna i Kiev också alldeles själv – utan att de först behövt mappa upp hela staden med laser!
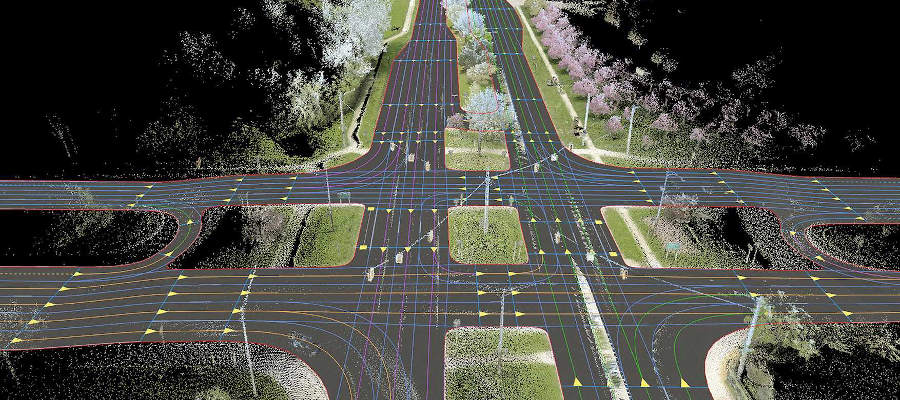
För grundläggande skillnaden mellan Teslas och Waymos sätt att lösa självkörande bilar handlar inte om lidar eller kameror – utan om 3D kartor. För innan Waymos och de andras självkörande bilar kan åka i en stad måste alla gatorna först skannas av med extrem hög upplösning och skapa en detaljerad 3D karta med centimeterupplösning. Sedan ska mänskliga kartläsare markera på kartan alla vägar, alla filer bilar får köra på, alla korsningar och hinder. Alla vägskyltar lagras som metadata i kartan, även alla hastighetsbegränsningar, alla övergångsställen, alla stopplinjer. Positionen för alla trafikljus sparas också.
Den resulterande högupplösta kartan har alla ytor där bilen får köra markerade. Som det syns i ovan bild lagras även hur varje fil löper samt åt vilket håll man får köra i den. Även hur svängarna i korsningen ska tas, positionen av trafikljus och omgivande stolpar etc lagras. De markerade filerna blir som virtuella spår bilen kan följa.
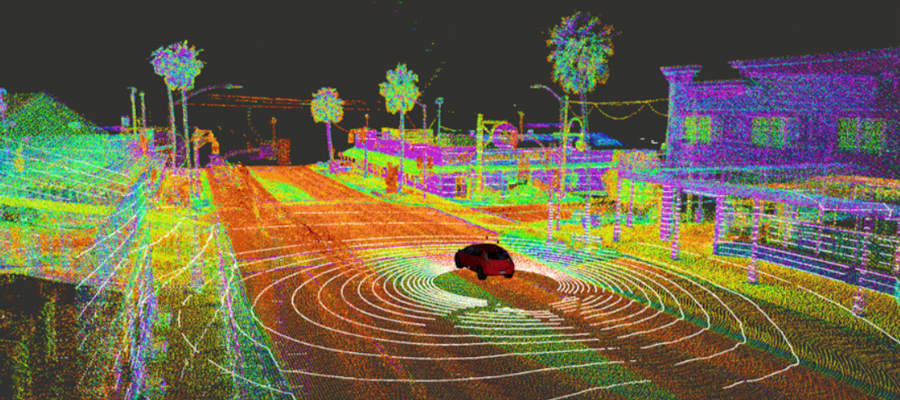
När bilen sedan åker längs med gatan skannar den av sin omgivning med sin egen lidar. Den har rejält lägre upplösning än dem som användes till att skapa den högupplösta kartan men genom att jämföra sin skanning med kartan kan bilen på 10 cm när avgöra var på kartan den befinner sig. Bilen kan även jämföra vad dess lidar ser med den högupplösta kartan för att se vilka bilar och andra trafikanter den har omkring sig. 3D-kartan innehåller endast tomma gator så om bilens lidar detekterar något stort där det enligt kartan bara borde vara platt asfalt är det nog en bil där.

Råkar deras självkörande bilar ut för något oväntat kontaktar den ett supportcenter med mänskliga förare som hjälper bilen runt hindret.
Utan att ha skannat av stadens alla gator, utan människor som bearbetat 3D kartorna och noga markerat ut vilka filer bilen får köra på, skapat virtuella spår bilen ska följa, utan människor som sitter i supportcenter redo att hjälpa till är de flesta självkörande bilar totalt hjälplösa i en okänd ny stad.
Teslas bilar är däremot äkta självkörande, på riktigt. De behöver inga avdelningar med människor som hjälper till, inga skannade 3D-kartor. Den skapar sin egen bild av sina omgivningar. 3D kartan man ser på mittskärmen är den bilen själv skapade, utan mänsklig inblandning. Och de tittar på samma GPS karta som du när den ska hitta om den ska svänga till höger eller vänster i nästa korsning.
Även när bilen hamnat i en totalt okänt stad på andra sidan jordklotet kunde den köra själv, på en gång. Den körde inte perfekt, utan som en dum amerikansk turist som inte fattar de lokala trafikreglerna och skyltarna med kyrilliska bokstäver, men den lyckades köra från A till B i en totalt okänd stad! (Dessutom var det en av de allra första testmjukvarorna de fick tag på, version 8.2. Tesla har släppt många nyare mycket mer kapabla versioner av mjukvaran sedan dess.)
Och däri ligger Teslas enorma försprång: i och med att deras bilar är självkörande “på riktigt” blir systemet snabbt skalbart. Ska självkörande bilar lanseras globalt är det lättare att bara lära bilarna de olika ländernas trafikregler och skyltar än att behöva åka runt och 3D-skanna varenda gata i varenda stad och sedan behöva tusentals människor som jobbar i smyg för att skapa en illusion av självkörning.
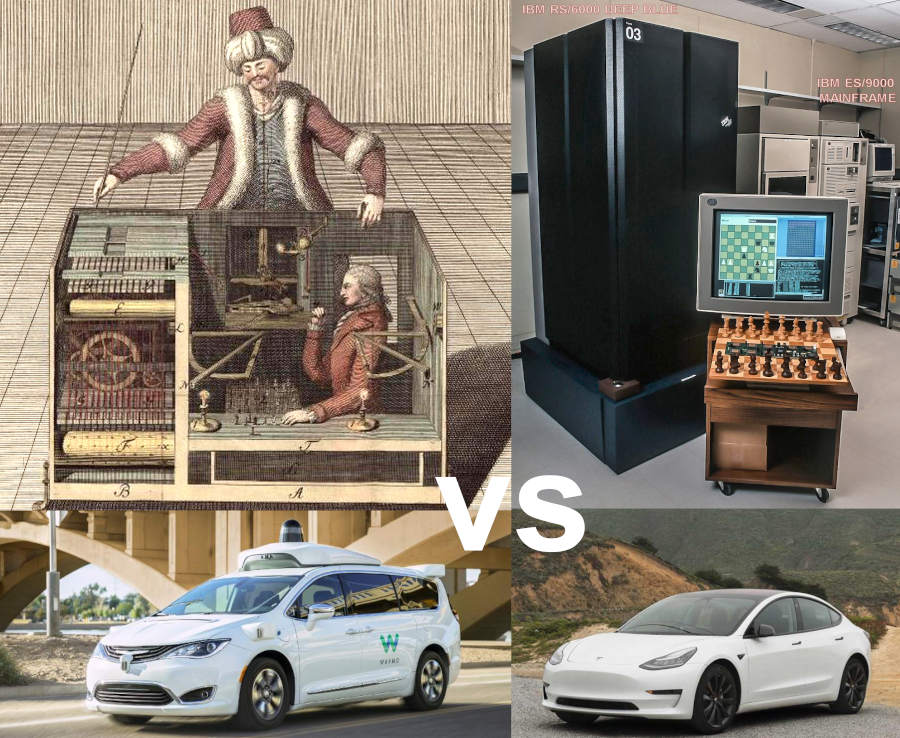
År 1770 visade Wolfgang von Kempelen upp “Turken”, en mekanisk maskin som påstods kunna spela schack. De häpna åskådarna kunde se en maskin med massor med kugghjul och mekanismer inuti som kunde röra schackpjäserna och besegra alla som spelade mot den. Men allt var en illusion – inuti maskinen gömde sig en mänsklig schackmästare som kontrollerade dockans mekaniska arm.
Den roboten såg ut att kunna spela schack själv men var beroende av människan inuti för att kunna klara sig. Det dröjde till 1996 tills en schackspelande dator på riktigt, på egen hand kunde besegra en världsmästare. Det tog 226 år tills datorn Deep Blue på riktigt kunde göra det “Turken” låtsades göra.
Den första till synes självkörande robotaxin lanserades av Waymo i oktober i fjol. Det fanns ingen förare i bilen – men den körde längs virtuella spår på 3D kartor minutiöst preparerade av tusentals människor. Tack vare Andrej Karpathy och hans kollegor på Tesla behöver vi inte vänta i 226 år tills vi kan se självkörande bilar – på riktigt.
 Så fungerar självkörande bilar
Så fungerar självkörande bilar
Läs mer om skillnaderna mellan Teslas och de andra företagens självkörande bilar. De flesta pratar om lidar vs kameror men den viktigaste skillnaden är snarare förskannade 3D-kartor vs bilen fattar sin omgivning på egen hand.
 Tesla AI day
Tesla AI dayLäs mer om hur Teslas självkörande mjukvara fungerar och hur Tesla har utvecklat den helt själva. Tesla tillverkar både bilarna, självkörande datorn, chippen till den, mjukvaran som körs på den – och även datorn, chippen och mjukvaran som behövs för att träna upp den självkörande AI-n!
 Så klarar självkörande Teslan snö
Så klarar självkörande Teslan snö
Vi har sett många klipp med självkörande bilar som kör runt på perfekta gator i soliga Kalifornien. Men hur kommer de självkörande bilarna någonsin kunna klara sig på snötäckta gator? En av dem som fått Teslas beta-mjukvara åkte upp i bergen för att testa. Läs om hur det gick här.
Jag har inte följt utvecklingen av Teslas autopilot den senaste tiden så hur ser säkerhetsstatistiken ut nu? Den måste man ju jämföra för att det ska bli rättvist.
Baserat på statistik från början av året så har Waymo och Cruise ungefär en “disengagement” per 5000 mil och sist jag kollade så var Tesla inte ens i närheten av de siffrorna.
De DMV rapporter du troligtvis sett har lämnats in av Waymo, Cruise med flera men inte av Tesla då de inte testar självkörande bilar på samma sätt med egna testflottor. Baserat på det vi sett hittills med de självkörande beta mjukvarorna har dock Tesla säkerligen mångdubbelt fler disengagements per 5000 mil än Waymo och Cruise. Ganska naturligt i och med de olika sätten att lösa problemet.
Ärligt att jämföra disengagement på Waymo och Tesla just nu är som att jämföra hur ofta spårvagnar respektive bussar krockar med träd. Bussar krockar säkert mycket oftare med träd – men bara för att spårvagnar kör på noga preparerade spår som det inte står träd på. På samma sätt klarar sig Waymo följa noga preparerade virtuella spår och har därmed en mycket enklare uppgift att lösa. Teslas enormt mer krångliga uppgift ger mångdubbelt fler felkällor och därmed också misstag.
Ändå kommer Tesla gå vinnande ur det hela den dagen de lyckas få ner antal disengagement för det blir enklare att skala deras system. Jämför hur enkelt det är att starta en ny busslinje vs en ny spårvagnslinje. Trots att bussar är mer troliga att krocka med träd än spårvagnar.
Väldigt bra och pedagogisk förklaring mellan äkta självkörande bilar, och semi-äkta sådana.