

Det pratas mycket om självkörande bilar nu. Vi har också haft ett antal artiklar om dem. Det skapade mycket uppmärksamhet när Google-ägda Waymo lanserade sin förarlösa robotaxi-tjänst i Phoenix, Arizona i fjol.
Men hur fungerar Waymos, Cruises och de andras självkörade bilar egentligen? Och på vilket sätt är Teslas approach annorlunda? Det pratas mycket om lidar men vägvalet handlar egentligen om mycket mer än själva sensorn.

Innan självkörande bilar kan åka i en stad skannas gatorna av med extrem hög upplösning. Fordon som påminner om Google maps bilar kör runt på alla gator och förutom sedvanliga bilder skannar de även av omvigningarna med en extremt högupplösande laserskanner. Lidarn som sitter högst uppe på de bilarna har mångdubbelt högre prislapp och upplösning än dem på de självkörande bilarna.
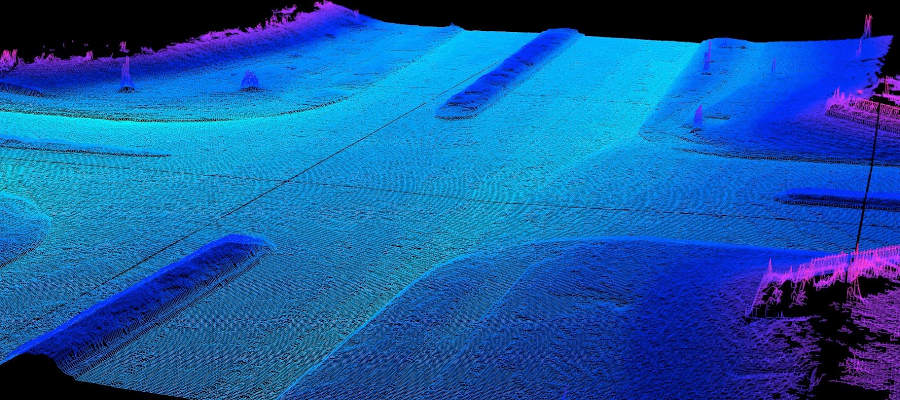
Resultatet är 3D kartor med centimeterupplösning. Mänskliga kartläsare markerar sedan på kartan alla vägar, alla filer bilar får köra på, likaså alla korsningar och hinder. Alla vägskyltar lagras som metadata i kartan, även alla hastighetsbegränsningar, alla övergångsställen, alla stopplinjer. Positionen för alla trafikljus sparas också.
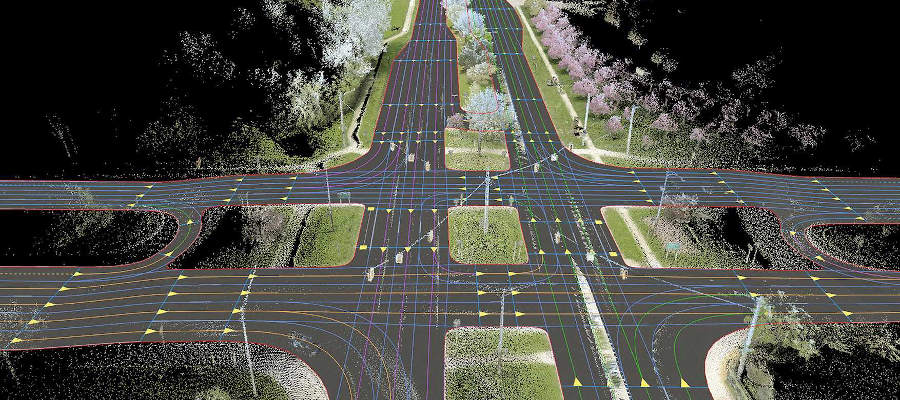
Den resulterande högupplösta kartan har alla ytor där bilen får köra markerade. Som det syns i ovan bild lagras även hur varje fil löper samt åt vilket håll man får köra i den. Även hur svängarna i korsningen ska tas, positionen av trafikljus och omgivande stolpar etc lagras. De markerade filerna blir som virtuella spår bilen kan följa.
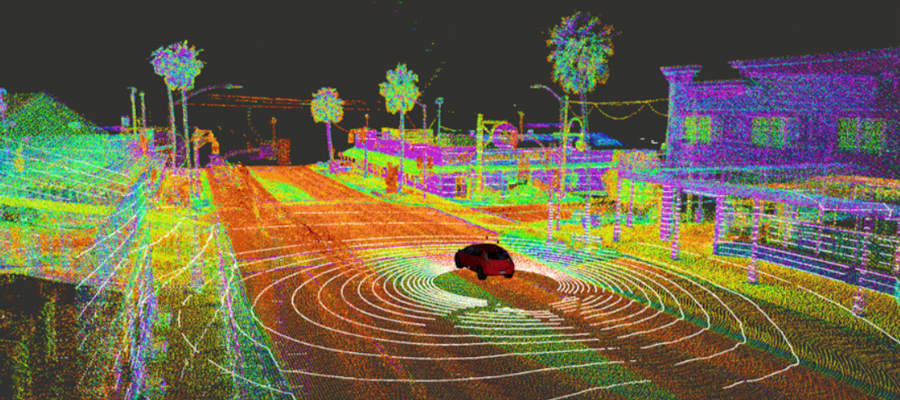
När bilen sedan åker längs med gatan skannar den av sin omgivning med sin egen lidar. Den har rejält lägre upplösning än dem som användes till att skapa den högupplösta kartan men genom att jämföra sin skanning med kartan kan bilen på 10 cm när avgöra var på kartan den befinner sig.

Bilen kan även jämföra vad dess lidar ser med den högupplösta kartan för att se vilka bilar och andra trafikanter den har omkring sig. 3D-kartan innehåller endast tomma gator så om bilens lidar detekterar något stort där det enligt kartan bara borde vara platt asfalt är det nog en bil där.
Kartan innehåller all data om hur många filer gatan har, vilken fil man ska välja för att svänga till vänster, vilka skyltar som finns i korsningen, var alla övergångsställen ligger och var bilen ska stanna vid till exempel rött ljus. Bilen behöver inte skanna och försöka känna igen sånt med sin egen dator, jobbet hade en gång för alla redan gjorts när människorna förberedde den högupplösta 3D kartan. Likaså har bilen endast ett antal förutbestämda virtuella spår den behöver följa. I teorin skulle bilen kunna köra överallt där det finns asfalt men i verkligheten följer den förutbestämda virtuella spår likt en spårvagn som följer sina järnvägsspår.
Kartan innehåller också exakta positionen där trafikljusen befinner sig, så bilen vet var den ska titta efter dem. Trafikljus är en föränderlig komponent i trafikmiljön som bilen måste anpassa sig efter i realtid. Likaså trafiken omkring sig. Bilens begränsade processorkraft behöver inte slösas på att förstå sin omgivning. Informationen om var den är, vilka trafikregler som gäller här, var gatorna finns och vart den får åka får den från sin 3D karta. Baserad på den informationen avgör bilen vilken av de olika virtuella spåren den ska följa för att undvika hindren omkring sig och köra vidare.

Problemet med 3D kartor är dock att verkligheten ändrar sig hela tiden. Vägar läggs om, trafikskyltar byts ut, gator grävs upp. Eller så kan bilen råka ut för en komplex trafiksituation som den inte kan klara på egen hand. Då kontaktar den självkörande bilen en mänsklig fjärroperatör och ber om hjälp.
Företagen har etablerat supportcenter där mänskliga förare hjälper de självkörande bilarna. Inte genom att ta över ratten och köra dem utan på en högre nivå: de justerar de virtuella spåren bilarna ska följa så att de undviker till exempel vägbygget. Har en mänsklig operatör justerat körvägen för första bilen i nöd kommer de efterföljande bilarna att på egen hand klara sig förbi platsen. Operatörerna kan även hjälpa till i komplexa situationer och välja rätt virtuellt spår ifall bilen inte kunde välja mellan olika alternativ eller bekräfta att det är till exempel ofarligt att passera korsningen nu.
Tesla har valt ett fundamentalt annorlunda sätt att göra sina bilar självkörande. Många tror att det handlar om lidar eller inte lidar men tillvägagångssättet är ännu mer annorlunda.
Problemet med att ha högupplösta 3D kartor bilarna kör efter är att de kartorna måste skapas. Innan en självkörande bil kan köra i en stad måste stadens alla gator först skannas av med högupplöst lidar och kartorna måste sedan manuellt märkas upp med var filerna finns, vilka skyltar det finns längs vägen och hur bilarna ska svänga i varenda korsning. Utan dessa kartor kan inte självkörande bilen köra.
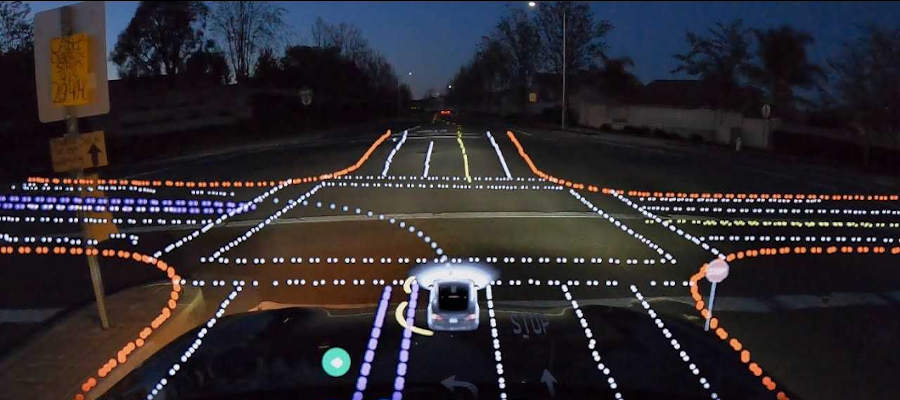
Teslas FSD mjukvara skapar dessa högupplösta kartor “on the go”. Det är inte en skannerbil som åkt runt och människor som skapat färdiga 3D kartor utan det är bilens egen dator som gör jobbet: den tolkar bilderna bilens kameror ser och skapar sin egen 3D karta i realtid. Den känner själv igen hur vägarna går, var filerna finns, var den får åka. Ovan bild visar hur bilens egen dator omvandlat bilden dess kamera ser till en 3D presentation av korsningen. Att det fanns en stoppskylt där stod inte på någon färdig karta utan det är bilens dator som såg det. Likaså strecket på asfalten var den skulle stanna. De olika filerna stod heller inte på en karta utan bilens dator kände igen dem på kamerabilden. Det fanns heller ingen färdig virtuell spår som visade hur den skulle göra vänstersvängen så den kom till rätt fil efter korsningen. Allt det klurade bilens dator ut på egen hand.
Till sin hjälp har den endast samma GPS karta du själv brukar navigera efter. Berättar att du ska svänga till vänster i nästa korsning för att komma till ditt mål – men som inte visar med 10 cm noggrannhet hur du ska ta den där svängen för att hamna i rätt fil efteråt.
Teslas sätt att lyckas få till självkörande bilar är flera magnitud svårare än vad andra valt. Det handlar inte så mycket om lidar eller kameror utan om högupplöst 3D karta eller Google maps. Waymos självkörande taxibilar klarar av att köra själva för att människor i förväg minutiöst hade kartlagt vägarna den kör och berättat för den hur den ska åka. Om den ändå inte klarar av att göra det finns supportcenter med mänskliga förare som kan hjälpa till. De självkörande bilar som finns idag klarar sig till synes på egen hand – men de gör det genom att ha fått mänsklig hjälp innan och medan de kör.
Teslas FSD mjukvara försöker göra bilarna mycket mer “äkta” självkörande. Det är bilens dator som ska klara uppgiften utan hjälp av någon 3D karta. På så vis ska den klara av att framföra bilen även i städer, på gator där ingen annan självkörande bil någonsin hade åkt förut. Precis som du klarar dig i en främmande stad med bara Googlekartan som hjälp. Än så länge behöver den övervakas av människan bakom ratten. I framtiden kanske även Tesla kommer tvingas använda sig av supportcenter för övervakningen. Men det långsiktiga målet är att göra bilarna äkta självkörande, utan behov av förkalkylerade 3D kartor och mänskliga supportcenter.
Bra artikel som vanligt!
Det sätt jag brukar tänka på skillnaden mellan Teslas och lidar-ansatsen, är att Tesla försöker få till en lösning som kan ta ett tillräckligt bra beslut på så lite information som möjligt. Lidar-ansatsen försöker tvärtom få till så mycket information som möjligt. Det kanske låter som mycket information är bättre än lite, men hur kraftig dator bilen än har så är denna begränsad, dvs. den kan inte hantera oändligt med information.
Herbert Simon myntade på 1940-talet begreppet begränsad rationalitet för människors beslutsförmåga*. Tricket inom management är att få fram ett intelligent selekterat beslutsunderlag. Det är så jag tolkar Teslas ansats, och som jag ser som den enda rimliga vägen till level 5.
* Före Simon trodde man att människor var hur smarta som helst, i alla fall en viss grupp.
Intressant. Din artikel från 21 april var en aha-upplevelse för mig där Elon säger att man valt att helt förlita sig på bilens kameror. Jag tror detta är rätt väg att gå!
Pingback: Polis skriker “flytta på dig” åt självkörande bil – Tesla Club Sweden
Pingback: Robotaxi enhörning – Tesla Club Sweden
Pingback: Självstyrning inte “coming soon” längre i USA – Tesla Club Sweden
Pingback: Världens första självkörande bil? Inte än. – Tesla Club Sweden
Pingback: De självkörande bilarna är inte självkörande – Tesla Club Sweden